Z tej strony możesz pobrać modele i pliki, które po wydrukowaniu na drukarce 3D pomogą w zbudowaniu modelu napędowego dla Korbo Blocks ze sterownikiem Q-scout.
Modele do druku:

- Adapter mocujący sterownik do platformy Korbo Blocks.
Adapter ten pozwala na połączenie sterownika robota Q-scout z platformą Korbo Blocks. Na spodzie znajdują się także łączniki do walców i bolców, które pozwalają zamocować sterownik również bezpośrednio do tych elementów Korbo Blocks.
2. Pojemnik na motor wraz z zasuwaną pokrywą.

Pojemnik pozwala na schowanie w nim motoru napędzającego. Posiada też specjalny otwór, dzięki któremu możliwe jest osadzenie tego modułu na walcu z Korbo Blocks. W ten sposób walec jednocześnie zapobiega niechcianym obrotom całego modułu pod większym obciążeniem (czyli kiedy napędzamy większy układ kół zębatych).
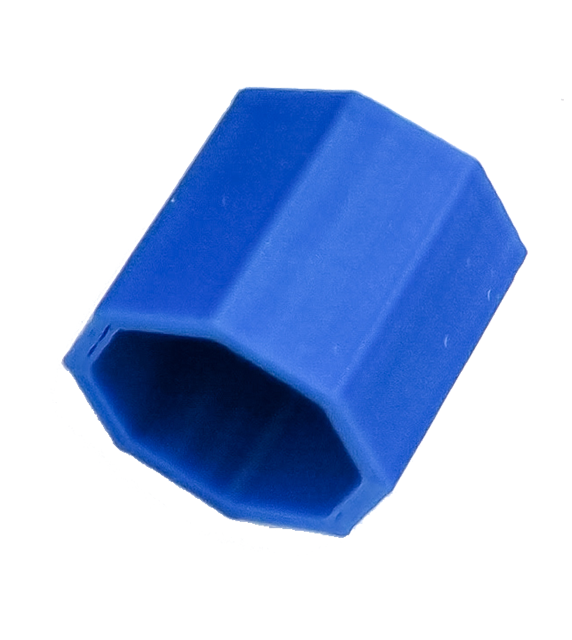
3. Moduł napędowy – łącznik motoru i koła zębatego
Moduł ten pozwala połączyć wał wirnika motoru (czyli obracającą się „końcówkę”) z kołem zębatym, które następnie będzie napędzać cały układ. Z jednej strony moduł ten wygląda jak łącznik prosty i za pomocą ośmiokątnego wtyku jest nakładany na koło zębate. Z drugiej strony posiada specjalnie przygotowane wejście w które należy włożyć wał wirnika motoru.
Pobierz pliki w formacie .stl
Pliki w formacie .stl należy po pobraniu zaimportować do slicer’a i przygotować pod druk.
Parametry druku: wysokość warstwy: 0,2mm, wypełnienie 15%
Pobierz pliki w formacie .gx
Pliki w formacie gx są przygotowane bezpośrednio do druku w drukarce Flashforge Adventurer 3. Temperatura druku wynosi 210 stopni (odpowiednia dla filamentów PLA FlashForge, PLA FlashFill oraz PLA Rosa Starter)
Montaż modułu napędowego krok po kroku wyjaśnia poniższy tutorial: